L298N मोटर ड्राइवर: सुविधाएँ, सर्किट आरेख और अनुप्रयोग
सूची
L298N का परिचय
L298N L298 का एक ऊर्ध्वाधर पैकेज संस्करण है।यह एक दोहरी-चैनल फुल-ब्रिज मोटर ड्राइवर चिप है जो उच्च वोल्टेज और उच्च वर्तमान को स्वीकार कर सकता है।इसका काम करने वाला वोल्टेज 46V तक पहुंच सकता है, और इसका अधिकतम आउटपुट करंट 4 ए है।इसके अलावा, L298N में दो सक्षम नियंत्रण टर्मिनल भी हैं।ये नियंत्रण टर्मिनल सर्किट के वर्किंग मोड को इनपुट सिग्नल द्वारा हस्तक्षेप किए बिना ऑनबोर्ड जम्पर को प्लग करके और अनप्लग करके गतिशील रूप से समायोजित करने की अनुमति देते हैं।L298N एक लॉजिक पावर इनपुट से लैस है, जो आंतरिक लॉजिक सर्किट भाग को कम वोल्टेज पर संचालित करने की अनुमति देता है।इसी समय, यह बाहरी रूप से 5V के लॉजिक वोल्टेज को भी आउटपुट कर सकता है।वोल्टेज को स्थिर करने वाले चिप को नुकसान से बचने के लिए, 12V से अधिक ड्राइविंग वोल्टेज का उपयोग करते समय, स्वतंत्र बिजली की आपूर्ति के लिए बाहरी 5V इंटरफ़ेस का उपयोग करने के लिए दृढ़ता से सिफारिश की जाती है।
L298N मुख्य नियंत्रण चिप पर I/O इनपुट टर्मिनल को नियंत्रित करता है और मोटर के आगे, रिवर्स और स्टॉप को महसूस करने के लिए बिजली की आपूर्ति के माध्यम से सीधे आउटपुट वोल्टेज को समायोजित करता है।आम तौर पर, L298N सीधे रिले (चार-तरफ़ा), सोलनॉइड, सोलनॉइड वाल्व, दो डीसी मोटर्स और एक स्टेपर मोटर (दो-चरण या चार-चरण) को चला सकता है।
विकल्प और समकक्ष:
• E-L298N
• L298HN
• LM18298T
L298N की कार्यात्मक विशेषताएं
लॉजिक इनपुट संगतता: L298N का लॉजिक इनपुट TTL, CMOS और अन्य लॉजिक स्तरों के साथ संगत है।
ओवरहीटिंग प्रोटेक्शन: L298N में ओवरहीटिंग प्रोटेक्शन फ़ंक्शन है।जब चिप तापमान बहुत अधिक होता है, तो यह स्वचालित रूप से आउटपुट को डिस्कनेक्ट कर देगा।
अंतर्निहित मुक्त ध्रुवीयता डायोड: L298N में एक अंतर्निहित मुक्त ध्रुवीयता डायोड है, जिसका उपयोग डीसी मोटर्स के ब्रेकिंग के लिए किया जा सकता है।
बड़े वर्तमान आउटपुट: L298N बड़े आउटपुट करंट प्रदान कर सकता है और कुछ ऐसे अनुप्रयोगों के लिए उपयुक्त है जिनके लिए बड़े ड्राइविंग करंट की आवश्यकता होती है।
डबल एच-ब्रिज संरचना: L298N एक डबल एच-ब्रिज संरचना को एकीकृत करता है, जो दो डीसी मोटर्स या स्टेपर मोटर्स के स्टीयरिंग और गति को नियंत्रित कर सकता है।
L298N सर्किट आरेख
L298N का सर्किट आरेख इस प्रकार है:
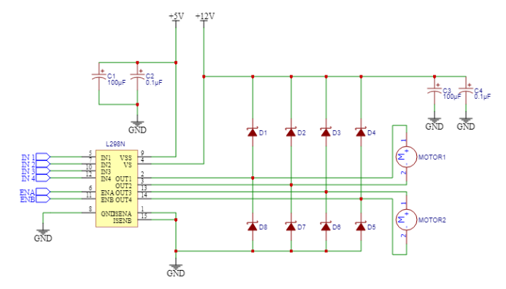
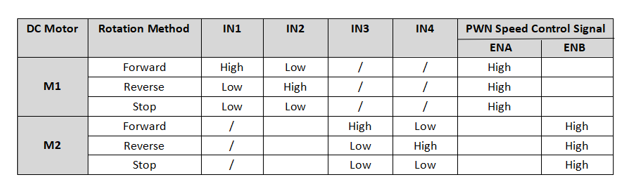
OUT1, OUT2 और OUT3, OUT4 मोटर 1, मोटर 2 से जुड़े हैं;IN1, IN2, IN3, IN4 पिन माइक्रोकंट्रोलर से नियंत्रण स्तर तक पहुंचने के लिए, मोटर को आगे और रिवर्स को नियंत्रित करने के लिए;ENA, ENB मोटर की गति को नियंत्रित करने के लिए सक्षम टर्मिनल के नियंत्रण से जुड़ा हुआ है।L298N नियंत्रण तर्क संबंध आरेख इस प्रकार है:
मोटर गति विनियमन के बारे में, हमने PWM स्पीड रेगुलेशन विधि को अपनाया है।सिद्धांत एक चक्र में स्विचिंग ट्यूब के चालन समय टी को नियंत्रित करके गति विनियमन को साकार करने में निहित है।एक पूर्ण चक्र टी के दौरान मोटर के पार औसत वोल्टेज यू को यू = वीसीसी × (टी/टी) = ए × वीसीसी के रूप में व्यक्त किया जा सकता है।जहां, ए = टी/टी, को ड्यूटी चक्र के रूप में जाना जाता है और वीसीसी आपूर्ति वोल्टेज का प्रतिनिधित्व करता है।मोटर की गति मोटर के पार वोल्टेज के लिए आनुपातिक है, जबकि मोटर के पार वोल्टेज नियंत्रण तरंग के कर्तव्य चक्र के लिए आनुपातिक है।इसलिए, मोटर की गति और कर्तव्य चक्र के बीच एक आनुपातिक संबंध है: जितना अधिक कर्तव्य चक्र, मोटर की गति उतनी ही तेजी से।
L298N की नियंत्रण विधि
L298N का उपयोग करते समय, हमें मोटर के आगे और रिवर्स रोटेशन और गति को नियंत्रित करने के लिए IN1, IN2, IN3 और IN4 पर नियंत्रण संकेतों को इनपुट करने की आवश्यकता है।यहाँ कई नियंत्रण विधियां हैं:
पीडब्लूएम नियंत्रण मोड
PWM मोड मोटर की गति को प्रभावी ढंग से नियंत्रित कर सकता है।PWM मोड का उपयोग करते समय, हमें मोटर की गति को समायोजित करने के लिए दो पिन EN1 और EN2 का उपयोग करने की आवश्यकता है।विशेष रूप से, जब EN1 और EN2 पिन उच्च स्तर पर होते हैं, तो मोटर सामान्य रूप से काम करेगी;जब वे निम्न स्तर पर होते हैं, तो मोटर घूमना बंद कर देगी।
एक-तरफ़ा नियंत्रण मोड
जब IN1, IN2, IN3 और IN4 एक ही समय में उच्च स्तर पर होते हैं, तो मोटर आगे घूमती है;जब कोई भी दो इनपुट पोर्ट उच्च स्तर के होते हैं और अन्य दो इनपुट पोर्ट निम्न स्तर होते हैं, तो मोटर उल्टा घूमती है।
द्विदिश नियंत्रण विधा
बिडायरेक्शनल कंट्रोल मोड का उपयोग करते समय, IN1 और IN2 मोटर 1 को नियंत्रित करने के लिए जिम्मेदार होते हैं, जबकि IN3 और IN4 मोटर 2 को नियंत्रित करने के लिए जिम्मेदार होते हैं। विशेष रूप से, जब IN1 उच्च स्तर पर होता है और IN2 निम्न स्तर होता है, तो मोटर 1 आगे घूम जाएगा;इसके विपरीत, जब IN1 निम्न स्तर होता है और IN2 उच्च स्तर होता है, तो मोटर 1 उल्टा घूम जाएगा।उसी तरह, IN3 और IN4 का नियंत्रण तर्क मोटर 2 के आगे और रिवर्स रोटेशन नियंत्रण पर भी लागू होता है।
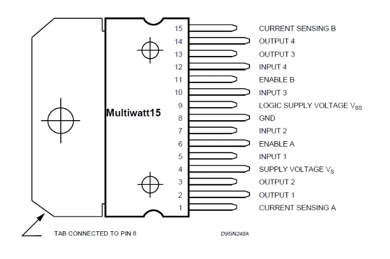
पिन आरेख और L298N के कार्यों
पावर पिन
वीएस: आपूर्ति वोल्टेज इनपुट (46 वी तक)
GND: ग्राउंड पिन
तर्क नियंत्रण पिन
In1, In2: मोटर 1 के रोटेशन दिशा को नियंत्रित करने के लिए उपयोग किया जाता है
IN3, IN4: मोटर 2 के रोटेशन दिशा को नियंत्रित करने के लिए उपयोग किया जाता है
मोटर नियंत्रण पिन:
Out1, out2: मोटर 1 की दिशा को नियंत्रित करने के लिए उपयोग किया जाता है
OUT3, OUT4: मोटर 2 की दिशा को नियंत्रित करने के लिए उपयोग किया जाता है
ENA: पिन सक्षम करें, मोटर 1 की गति को नियंत्रित करने के लिए उपयोग किया जाता है
ENB: पिन सक्षम करें, मोटर 2 की गति को नियंत्रित करने के लिए उपयोग किया जाता है
L298N का उपयोग कैसे करें?
बिजली की आपूर्ति कनेक्ट करें: L298N ड्राइवर मॉड्यूल की बिजली की आपूर्ति को 12V से 35V की सीमा में रखा जाना चाहिए।व्यावहारिक अनुप्रयोगों में, बिजली की आपूर्ति की स्थिरता सुनिश्चित करने के लिए, हमें बिजली की आपूर्ति को फ़िल्टर करने की भी आवश्यकता हो सकती है।
मोटर्स को कनेक्ट करें: हम दो मोटर्स को ड्राइवर के माध्यम से L298N के आउटपुट पिन से कनेक्ट करते हैं, और नियंत्रण स्तर सीधे L298N के माध्यम से मोटर के लिए इनपुट होता है।
नियंत्रण L298N: हम L298N को नियंत्रित करने के लिए नियंत्रण पोर्ट (सक्षम, नियंत्रण पिन) का उपयोग करते हैं।मान असाइन करते समय हमें सक्षम पोर्ट और कंट्रोल पिन की स्थिति निर्धारित करने की आवश्यकता है।ये स्थिति L298N आउटपुट की स्तर की स्थिति निर्धारित करेगी।इन राज्यों को बदलकर, हम प्रभावी रूप से मोटर के आगे और रिवर्स रोटेशन और गति को नियंत्रित कर सकते हैं।
मोटर की गति को विनियमित करने के लिए पीडब्लूएम का उपयोग कैसे करें?
यदि हम मोटर की गति को विनियमित करने के लिए PWM का उपयोग करना चाहते हैं, तो हमारे पास दो वायरिंग तरीके हैं:
वायरिंग विधि एक (अनुशंसित):
हम चैनल सक्षम और 5V के बीच जम्पर कैप को हटा देते हैं, सक्षम पिन को Arduino के pwm पिन से कनेक्ट करें, और Pins 1 और 2 को Arduino के दो सामान्य पिन से कनेक्ट करें।इस तरह, हम मोटर की गति को समायोजित करने के लिए पीडब्लूएम पिन के माध्यम से चैनल के स्विच को नियंत्रित कर सकते हैं;पिन 1 और 2 की स्तर की स्थिति को नियंत्रित करके, हम मोटर के रोटेशन दिशा को नियंत्रित कर सकते हैं।वायरिंग के इस तरीके से केवल प्रति चैनल एक पीडब्लूएम पिन के उपयोग की आवश्यकता होती है, लेकिन दो सामान्य पिन ले जाते हैं।इसलिए, व्यावहारिक अनुप्रयोगों में, हमें Arduino पर उपलब्ध पिनों की संख्या के आधार पर कई वायरिंग विधियों में से कई तौलने और चुनने की आवश्यकता है।
वायरिंग विधि दो (अनुशंसित नहीं):
हम चैनल सक्षम और 5V के बीच जम्पर को नहीं हटाते हैं, इसलिए चैनल लगातार खुला रहेगा।फिर, हमने पिन 1 और 2 को क्रमशः Arduino के दो PWM इंटरफेस से जोड़ा।क्रमशः इन दो पिनों के अनुरूप आउटपुट को नियंत्रित करके, हम मोटर रोटेशन दिशा और गति को नियंत्रित कर सकते हैं।जाहिर है, यह वायरिंग विधि अधिक पीडब्लूएम पिन पर कब्जा करेगी, क्योंकि प्रत्येक चैनल को नियंत्रित करने के लिए दो पीडब्लूएम पिन की आवश्यकता होती है।हालांकि, यह विधि किसी भी सामान्य पिन पर कब्जा नहीं करती है।इसलिए, हम इस वायरिंग स्कीम का उपयोग करने की सलाह नहीं देते हैं जब PWM पिन संसाधन तंग होते हैं।
L298N का उपयोग कहाँ किया जाता है?
इलेक्ट्रिक वाहन: L298N का उपयोग इलेक्ट्रिक वाहनों में ड्राइव मोटर्स को नियंत्रित करने के लिए किया जा सकता है, जैसे कि इलेक्ट्रिक साइकिल, स्कूटर, आदि। उदाहरण के लिए, साइकिल में, मोटर की रोटेशन की गति और दिशा को ठीक से नियंत्रित करके, L298N त्वरण, मर्दानगी और प्राप्त कर सकता है।इलेक्ट्रिक साइकिल की स्थिर ड्राइविंग।राइडर हैंडल या बटन का संचालन करके L298N को निर्देश प्रेषित कर सकता है, जिससे राइडर की इच्छाओं के अनुसार साइकिल ड्राइव बनाने के लिए मोटर के आउटपुट को नियंत्रित किया जा सकता है।
स्वचालित औद्योगिक उपकरण: औद्योगिक स्वचालन के क्षेत्र में, L298N का उपयोग विभिन्न औद्योगिक उपकरणों के मोटर्स को नियंत्रित करने के लिए किया जा सकता है, जैसे कि कन्वेयर बेल्ट, रोबोटिक हथियार, औद्योगिक रोबोट आदि। उदाहरण के लिए, रोबोटिक आर्म में, L298N सटीक रूप से नियंत्रित करता हैरोटेशन कोण और मोटर की गति, रोबोट आर्म को एक पूर्व निर्धारित प्रक्षेपवक्र के अनुसार स्थानांतरित करने और उच्च-सटीक संचालन प्राप्त करने की अनुमति देता है।यह न केवल उत्पादन दक्षता में सुधार करता है, बल्कि परिचालन त्रुटियों के कारण होने वाले उत्पादन नुकसान को भी कम करता है।
रोबोट प्रौद्योगिकी: L298N का उपयोग अक्सर रोबोट परियोजनाओं में रोबोट के आंदोलन और कार्रवाई को महसूस करने के लिए ड्राइव मोटर को नियंत्रित करने के लिए किया जाता है।औद्योगिक रोबोटों को अक्सर भारी-लोड, उच्च-सटीक काम करने की आवश्यकता होती है, और ड्राइव मोटर्स पर अत्यधिक उच्च आवश्यकताएं होती हैं।L298N अपनी उत्कृष्ट ड्राइविंग क्षमता और स्थिरता के साथ औद्योगिक रोबोट के लिए शक्तिशाली बिजली सहायता प्रदान करता है।चाहे वह हैंडलिंग, असेंबली या निरीक्षण हो, L298N यह सुनिश्चित कर सकता है कि औद्योगिक रोबोट सही और कुशलता से कार्यों को पूरा करते हैं।
स्मार्ट होम: स्मार्ट होम सिस्टम्स में, L298N का उपयोग स्वचालित नियंत्रण प्राप्त करने के लिए ब्लाइंड्स, पर्दे, दरवाजों और अन्य उपकरणों की मोटरों को नियंत्रित करने के लिए किया जा सकता है।सेंसर के साथ संयोजन करके, घर के उपकरणों को प्रकाश, तापमान और अन्य स्थितियों के अनुसार स्वचालित रूप से समायोजित किया जा सकता है।
सोलर ट्रैकिंग सिस्टम: सोलर सिस्टम में, L298N का उपयोग सौर ट्रैकिंग सिस्टम को लागू करने के लिए सौर पैनलों के झुकाव कोण को नियंत्रित करने के लिए किया जा सकता है।L298N के नियंत्रण के माध्यम से, सौर ट्रैकिंग सिस्टम वास्तविक समय में सूर्य की स्थिति परिवर्तन को महसूस कर सकता है और तदनुसार सौर पैनलों के झुकाव कोण को समायोजित कर सकता है।यह गतिशील समायोजन प्रक्रिया यह सुनिश्चित करती है कि सौर पैनल हमेशा सूर्य के लिए इष्टतम कोण बनाए रखते हैं, जिससे सौर पैनलों की ऊर्जा संग्रह दक्षता में सुधार होता है।
अक्सर पूछे जाने वाले प्रश्न [FAQ]
1. क्या L298N नियंत्रण की गति हो सकती है?
L298N एक दोहरी एच-ब्रिज मोटर ड्राइवर है जो एक ही समय में दो डीसी मोटर्स की गति और दिशा नियंत्रण की अनुमति देता है।
2. मेरा L298N काम क्यों नहीं कर रहा है?
यह L298 के सही संचालन के लिए 4.5V से ऊपर होना चाहिए।2. आप L298 में शायद 2.5V खो देंगे।शायद मोटर चलाने के लिए पर्याप्त वोल्टेज नहीं बचा है।
3. L298N क्या है?
L298N मोटर ड्राइवर एक नियंत्रक है जो गति को नियंत्रित करने के लिए मोटर्स दिशा और PWM को आसानी से नियंत्रित करने के लिए एक एच-ब्रिज का उपयोग करता है।यह मॉड्यूल आपको स्वतंत्र रूप से दोनों दिशाओं में 2 ए तक के दो मोटर्स का प्रबंधन करने की अनुमति देता है।आपूर्ति रेंज 5V और 35V के बीच भिन्न हो सकती है, अधिकांश डीसी मोटर परियोजनाओं के लिए पर्याप्त है।
4. क्या हम 4 मोटर्स को L298N से जोड़ सकते हैं?
उत्तर हां है और नहीं। यह इस बात पर निर्भर करता है कि आप L298N मोटर ड्राइवर का उपयोग कैसे करते हैं।L298N मूल रूप से दो डीसी मोटर्स या एक स्टेपर मोटर को नियंत्रित करने के लिए डिज़ाइन किया गया है।लेकिन, यदि आप नहीं चाहते हैं कि प्रत्येक मोटर पीछे की ओर घूमती है, तो आप दो डीसी मोटर्स और कुल 4 मोटर्स को नियंत्रित करने के लिए L298N ड्राइवर के प्रत्येक पक्ष का उपयोग कर सकते हैं।