TB6600HG स्टेपर मोटर ड्राइवर: विनिर्देशों, सुविधाओं और अनुप्रयोगों
सूची
TB6600HG विवरण

TB6600HG एक पीडब्लूएम चॉपर टाइप सिंगल-चिप द्विध्रुवी साइनसोइडल माइक्रोस्टेपिंग मोटर ड्राइवर है।यह 2-चरण, 1-2-चरण, W1-2-चरण, 2W1-2-चरण, और 4W1-2-चरण उत्तेजना मोड के माध्यम से आगे और रिवर्स रोटेशन नियंत्रण प्राप्त कर सकता है।2-चरण द्विध्रुवी स्टेपर मोटर्स पूरी तरह से कम कंपन, उच्च दक्षता वाले घड़ी संकेत द्वारा संचालित होते हैं।
विकल्प और समकक्ष:
• TB6600FG
• L6258EX
TB6600HG के विनिर्देश
• भाग की स्थिति: सक्रिय
• पैकेजिंग: ट्रे
• पैकेज / केस: HZIP-25
• निर्माता: तोशिबा
• ऑपरेटिंग सप्लाई करंट: 4.2 एमए
• ऑपरेटिंग सप्लाई वोल्टेज: 2 वी से 5.5 वी
• लोड वोल्टेज रेटिंग: 8 वी से 42 वी
• आउटपुट की संख्या: 2 आउटपुट
• पीडी - पावर अपव्यय: 40 डब्ल्यू
• बढ़ते शैली: छेद के माध्यम से
• पैकेज की लंबाई/चौड़ाई/ऊंचाई: 29.3 मिमी (अधिकतम)/4.5 मिमी/15.7 मिमी
• उत्पाद श्रेणी: मोटर / गति / इग्निशन नियंत्रक और ड्राइवर
TB6600HG की परिचालन की स्थिति
(TA = -30 ° C से 85 ° C)
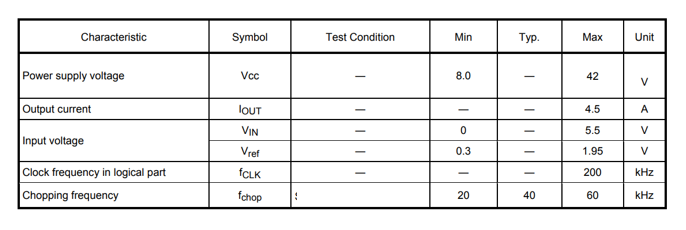
नोट: दो वीसीसी टर्मिनलों को एक ही वोल्टेज प्रोग्राम किया जाना चाहिए।ऑपरेटिंग रेंज का अधिकतम वर्तमान आवश्यक रूप से विभिन्न स्थितियों के आधार पर आयोजित नहीं किया जा सकता है क्योंकि आउटपुट करंट पावर अपव्यय पीडी द्वारा सीमित है।इस स्थिति में आईसी का उपयोग करने से बचने के लिए सुनिश्चित करें कि तापमान TJ (AVG।) = 107 ° C से अधिक हो जाएगा।
42 V की बिजली की आपूर्ति वोल्टेज और 4.5 A का आउटपुट करंट ऑपरेटिंग रेंज के अधिकतम मान हैं।कृपया बिजली की आपूर्ति भिन्नता, बाहरी प्रतिरोध और आईसी की विद्युत विशेषताओं पर विचार करके इस सीमा के भीतर पर्याप्त व्युत्पन्न के साथ सर्किट को डिज़ाइन करें।42 V की बिजली आपूर्ति वोल्टेज और 4.5 A के आउटपुट करंट से अधिक होने के मामले में, IC सामान्य रूप से काम नहीं करेगा।
TB6600HG को नियंत्रण प्रणाली से कैसे कनेक्ट करें?
पावर कनेक्शन: सबसे पहले, TB6600HG को उचित बिजली की आपूर्ति प्रदान करना सुनिश्चित करें।TB6600HG को पावर करते समय, आपको आमतौर पर दो पिनों को कनेक्ट करने की आवश्यकता होती है: VCC (सकारात्मक बिजली की आपूर्ति) और GND (ग्राउंड वायर)।VCC पिन चिप को चलाने के लिए आवश्यक वोल्टेज प्रदान करने के लिए जिम्मेदार है, जबकि GND पिन संदर्भ जमीनी स्तर के रूप में कार्य करता है।हमें यह सुनिश्चित करने की आवश्यकता है कि बिजली की आपूर्ति स्थिर है और TB6600HG के विनिर्देशों को पूरा करती है।
सिग्नल कनेक्शन: नियंत्रण प्रणाली की विशिष्ट आवश्यकताओं के अनुसार, हमें TB6600HG ड्राइवर चिप के संबंधित पिन से नियंत्रण संकेत को जोड़ने की आवश्यकता है।इन नियंत्रण संकेतों में आमतौर पर दिशा नियंत्रण संकेत और चरण पल्स सिग्नल आदि शामिल होते हैं, जो यह निर्देश देने के लिए जिम्मेदार होते हैं कि मोटर कैसे कार्य करता है, जिसमें रोटेशन की दिशा और रोटेशन की गति शामिल है।
मोटर कनेक्शन: मोटर को TB6600HG ड्राइवर चिप से जोड़ते समय हमें विशेष रूप से सावधान रहने की आवश्यकता है।मोटर के दो तार, आमतौर पर लाल और काले, क्रमशः मोटर के सकारात्मक और नकारात्मक ध्रुवों का प्रतिनिधित्व करते हैं।लाल तार आमतौर पर मोटर के सकारात्मक टर्मिनल से जुड़ता है, जबकि ब्लैक वायर नकारात्मक टर्मिनल से जुड़ता है।
फीडबैक कनेक्शन (वैकल्पिक): यदि फीडबैक नियंत्रण के लिए एक एनकोडर का उपयोग किया जाता है, तो हमें एनकोडर के आउटपुट सिग्नल को नियंत्रण प्रणाली से जोड़ने की भी आवश्यकता है।इसमें आमतौर पर चरण ए, चरण बी, और चरण Z (यदि उपलब्ध हो) के आउटपुट शामिल हैं।
ग्राउंडिंग: हमें यह सुनिश्चित करने की आवश्यकता है कि हस्तक्षेप और क्षति से बचने के लिए सभी उपकरणों का सामान्य ग्राउंड वायर सही ढंग से जुड़ा हुआ है।
आरंभीकरण सेटिंग्स: कनेक्शन पूरा होने के बाद, हमें यह सुनिश्चित करने के लिए TB6600HG की सेटिंग्स को इनिशियलाइज़ करने की आवश्यकता है कि यह सही तरीके से काम करता है।इसमें वर्तमान सीमाएं, स्टेपिंग मोड, आदि सेट करना शामिल हो सकता है।
TB6600HG उत्पाद सुविधाएँ
• अच्छी गर्मी अपव्यय के लिए एक बढ़े हुए रेडिएटर को अपनाएं
• उपखंड सेटअप निर्देश बोर्ड के पीछे मुद्रित किए जाते हैं
• आउटपुट शॉर्ट सर्किट प्रोटेक्शन फ़ंक्शन के साथ, चिंता-मुक्त उपयोग
• सिंक्रनाइज़ेशन के नुकसान के बिना उच्च गति सुनिश्चित करने के लिए 6N137 हाई-स्पीड ऑप्टिकल युग्मन को अपनाएं
• आउटपुट करंट आपके विभिन्न एप्लिकेशन आवश्यकताओं को पूरा करने के लिए स्थिर रूप से समायोज्य है
• सामान्य एनोड इनपुट मोड का उपयोग करते हुए, दो इनपुट टर्मिनल हैं, जिससे वायरिंग अधिक सुविधाजनक है
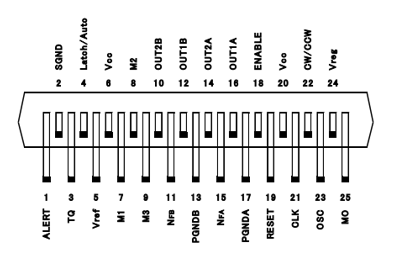
TB6600HG का पिन कॉन्फ़िगरेशन
TB6600HG का कार्य विवरण
उत्तेजना सेटिंग्स
उत्तेजना मोड को M1, M2 और M3 इनपुट का उपयोग करके निम्नलिखित आठ मोड से चुना जा सकता है।जब मोटर ऑपरेशन के दौरान M1, M2, या M3 इनपुट को स्थानांतरित कर दिया जाता है, तो एक नया उत्तेजना मोड प्रारंभिक मोड से शुरू होता है, संभावित रूप से आउटपुट वर्तमान तरंग की निरंतरता को बाधित करता है।
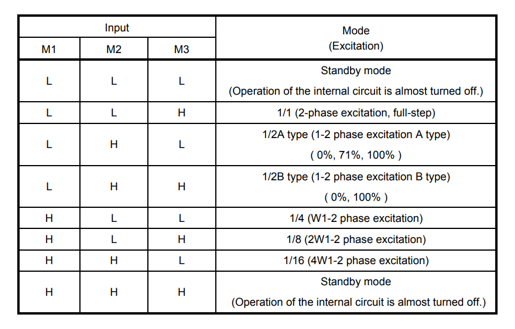
नोट: M1, M2, और M3 को बदलकर रोमांचक मोड को बदलने के लिए, सुनिश्चित करें कि M1 = M2 = M3 = L या M1 = M2 = M3 = H. सेट न करें।
आधार रीति
ऑपरेशन मोड स्थिति M1 = M2 = M3 = L या M1 = M2 = M3 = H के तहत स्टैंडबाय मोड में जाता है। ऑपरेशन की रक्षा को छोड़कर सभी ऑपरेशनों को बंद करके बिजली की खपत को कम से कम किया जाता है।स्टैंडबाय मोड में, आउटपुट टर्मिनल एमओ हर्ट्ज है।स्टैंडबाय मोड को M1 = M2 = M3 = L और M1 = M2 = M3 = H को अन्य राज्य में बदलकर जारी किया जाता है।स्टैंडबाय मोड जारी करने के बाद इनपुट सिग्नल को लगभग 200 μs के लिए स्वीकार नहीं किया जाता है।
क्षय विधा
पीडब्लूएम मोड में एक करंट को चार्ज करना और निर्वहन करना आमतौर पर ओएससीएम में लगभग पांच चक्रों की आवश्यकता होती है।40 प्रतिशत फास्ट क्षय मोड को फास्ट क्षय मोड के अंतिम दो चक्रों के भीतर क्षय को प्रेरित करके शुरू किया जाता है, जिसमें 40 प्रतिशत शेष लगातार तय होता है।मास्टर क्लॉक फ़्रीक्वेंसी (FMCLK), OSCM फ़्रीक्वेंसी (FOSCM) और PWM फ़्रीक्वेंसी (FCHOP) के बीच संबंध निम्नानुसार दिखाया गया है:
FOSCM = 1/20 × FMCLK
fchop = 1/100 × fmclk
जब ROSC = 51Kω, मास्टर क्लॉक = 4MHz, OSCM = 200kHz, PWM (FCHOP) की आवृत्ति = 40kHz।
प्रारंभिक विधा
जब रीसेट का उपयोग किया जाता है, तो चरण धाराएं इस प्रकार हैं।
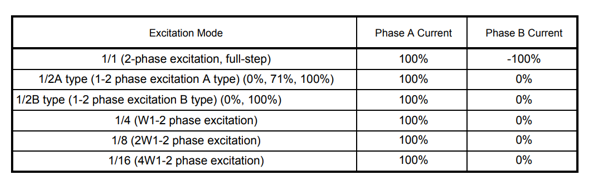
वर्तमान दिशा को निम्नानुसार परिभाषित किया गया है।
OUT1A → OUT2A: आगे की दिशा
OUT1B → OUT2B: आगे की दिशा
TB6600HG का अनुप्रयोग
नीचे सूचीबद्ध TB6600HG के कुछ एप्लिकेशन हैं।
• गाड़ी की पिछली लाइट
• आतिथ्य इमारतें
• बड़े आउटडोर एलईडी प्रदर्शन
• छिपी रोशनी का विकल्प
• औद्योगिक उच्च-बे लाइट्स
• बड़े प्रारूप एलईडी बैकलाइटिंग
• प्रदर्शन एलईडी बैकलाइटिंग
• कैमरा-सक्षम स्मार्टफोन
• स्टेप-अप या स्टेप-डाउन ड्राइवर टोपोलॉजी
TB6600HG के सामान्य दोष और समाधान
निम्नलिखित TB6600HG और उनके समाधानों के बारे में कुछ सामान्य दोषों को सूचीबद्ध करता है, जो दोषों का सामना करते समय त्वरित कार्रवाई करने में मदद करता है और डिवाइस के सामान्य संचालन को सुरक्षित रखता है।
विफलता एक: ड्राइवर चिप ओवरहीटिंग
TB6600HG चिप स्वयं बहुत गर्म है, शायद अत्यधिक भार या खराब गर्मी अपव्यय की स्थिति के कारण।
समाधान: गर्मी अपव्यय को बढ़ाएं
हमें ड्राइवर चिप और मोटर पर हीट सिंक या प्रशंसकों को जोड़ने की आवश्यकता है ताकि यह सुनिश्चित किया जा सके कि वे काम करते समय पूरी तरह से गर्मी को भंग कर सकें।उसी समय, हमें ओवरहीटिंग से बचने के लिए ड्राइवर चिप और मोटर के आसपास वातावरण को अच्छी तरह से हवादार रखने की आवश्यकता है।
विफलता दो: मोटर गलत दिशा में घूमती है
मोटर को ड्राइव सिग्नल प्राप्त करने के बाद, रोटेशन की दिशा अपेक्षित के अनुरूप नहीं है, यह नियंत्रण संकेत गलत हो सकता है या ड्राइव चिप ठीक से कॉन्फ़िगर नहीं किया गया है।
समाधान: नियंत्रण संकेत की जाँच करें
हमें यह सुनिश्चित करने के लिए TB6600HG को भेजे गए नियंत्रण संकेतों की सावधानीपूर्वक जांच करने की आवश्यकता है कि दिशा नियंत्रण संकेत और पल्स सिग्नल सही हैं।यदि सिग्नल भेजने के लिए एक माइक्रोकंट्रोलर का उपयोग किया जाता है, तो कृपया प्रोग्राम कोड और पिन कॉन्फ़िगरेशन की जांच करें।
विफलता तीन: मोटर घूमने में विफल रहता है
ड्राइव सिग्नल प्राप्त करने के बाद मोटर प्रतिक्रिया नहीं करता है, यह हो सकता है कि ड्राइवर चिप ठीक से काम नहीं कर रही है या मोटर और ड्राइवर चिप के बीच संबंध के साथ कोई समस्या है।
समाधान: बिजली की आपूर्ति और कनेक्शन की जाँच करें
हमें यह सुनिश्चित करने की आवश्यकता है कि TB6600HG की बिजली की आपूर्ति सामान्य है और मोटर और ड्राइवर चिप के बीच का संबंध ठोस है।हम एक मल्टीमीटर का उपयोग करके सर्किट में वोल्टेज और करंट की जांच करते हैं ताकि यह सुनिश्चित हो सके कि वे सामान्य सीमा में हैं।
विफलता चार: गंभीर मोटर हीटिंग
मोटर ऑपरेशन के दौरान अत्यधिक गर्मी उत्पन्न करता है, जो अत्यधिक वर्तमान या खराब गर्मी अपव्यय के कारण हो सकता है।
समाधान: वर्तमान सेटिंग को समायोजित करें
यदि मोटर गंभीर गर्मी पैदा कर रही है, तो हम ड्राइवर चिप के आउटपुट करंट को कम करने का प्रयास कर सकते हैं।TB6600HG की वर्तमान सेटिंग पिन को समायोजित करके, हम प्रभावी रूप से आउटपुट करंट के आकार को सीमित कर सकते हैं, जो बदले में मोटर पर बोझ को कम करता है और मोटर के स्थिर और सुरक्षित संचालन को सुनिश्चित करता है।
अक्सर पूछे जाने वाले प्रश्न [FAQ]
1. TB6600HG की ऑपरेटिंग तापमान रेंज क्या है?
TB6600HG का ऑपरेटिंग तापमान -30 ° C से 85 ° C तक होता है।
2. TB6600HG क्या है?
TB6600HG एक प्रकार का स्टेपर मोटर ड्राइवर है, जो विभिन्न अनुप्रयोगों जैसे CNC मशीनों, 3D प्रिंटर, रोबोटिक्स और ऑटोमेशन सिस्टम में स्टेपर मोटर्स को नियंत्रित करने के लिए डिज़ाइन किया गया है।
3. TB6600HG की प्रमुख विशेषताएं क्या हैं?
TB6600HG सुविधाओं में एडजस्टेबल मोटर करंट, स्टेप रिज़ॉल्यूशन सेटिंग्स, बिल्ट-इन ओवरहीटिंग प्रोटेक्शन और सिग्नल कंट्रोल के लिए ऑप्टो-सेल्सियेटेड इनपुट शामिल हैं।