एक्शन में MPU-6050: सेटअप, कॉन्फ़िगरेशन और शोर प्रबंधन के लिए व्यावहारिक गाइड
सूची
MPU-6050 का परिचय
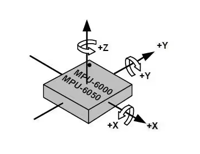
MPU-6050 दुनिया का पहला एकीकृत 6-एक्सिस मोशन प्रोसेसिंग घटक है, जो 3-एक्सिस गायरोस्कोप, 3-एक्सिस एक्सेलेरोमीटर और एक स्केलेबल डिजिटल मोशन प्रोसेसर (डीएमपी) को एकीकृत करता है।इसका उपयोग करने का उद्देश्य एक्स, वाई, और जेड कुल्हाड़ियों पर, या अर्थात्, पिच कोण, रोल एंगल, और यव कोण पर मापा जाने वाले ऑब्जेक्ट के झुकाव कोण को मापा जाना है (जैसे कि एक क्वाडकॉप्टर, एक संतुलन कार) प्राप्त करना।हम I2C इंटरफ़ेस के माध्यम से MPU-6050 (तीन-अक्ष त्वरण AD मान और तीन-अक्ष कोणीय वेग AD मान) के छह डेटा पढ़ते हैं।आसन फ्यूजन प्रोसेसिंग के बाद, पिच, रोल और यव कोणों की गणना की जा सकती है।माप मूल्यों के लिए एक दिशात्मक संदर्भ के रूप में, सेंसर समन्वय दिशा की परिभाषा नीचे दिए गए आंकड़े में दिखाया गया है, जो दाएं हाथ के समन्वय प्रणाली के सिद्धांत का अनुसरण करता है (यानी, सही अंगूठे X- की सकारात्मक दिशा में इंगित करता है-अक्ष, तर्जनी y- अक्ष की सकारात्मक दिशा की ओर इशारा करता है, और मध्य उंगली z- अक्ष की सकारात्मक दिशा की ओर इशारा करती है)।
अपने समर्पित I2C सेंसर बस के साथ, MPU-6050 एक बाहरी 3-अक्ष कम्पास से सीधे इनपुट प्राप्त करने में सक्षम है, जो एक पूर्ण 9-अक्ष मोशनफ्यूजन ™ आउटपुट प्रदान करता है।यह संयुक्त गायरोस्कोप और त्वरक समयरेखा के बीच विसंगति की समस्या को समाप्त करता है और बहु-घटक समाधानों की तुलना में पैकेजिंग स्थान को काफी कम कर देता है।जब तीन-अक्ष मैग्नेटोमीटर से जुड़ा होता है, तो MPU-60X0 अपने मुख्य I2C या SPI पोर्ट को पूर्ण 9-अक्ष मोशन फ्यूजन आउटपुट प्रदान करने में सक्षम होता है (ध्यान दें कि SPI पोर्ट केवल MPU-6000 पर उपलब्ध है)।
विकल्प और समकक्ष
• MPU-3300
• MPU-6000
• MPU-6500
MPU-6050 का निर्माता
MPU-6050 का निर्माता TDK है।टीडीके के दो संस्थापकों के बाद, डॉ। योगोरो काटो और टेकई टेकई ने टोक्यो में फेराइट का आविष्कार किया, उन्होंने टोक्यो डेनकिकगाकु कोग्यो के.के.1935 में। एक वैश्विक इलेक्ट्रॉनिक्स उद्योग ब्रांड के रूप में, टीडीके ने हमेशा इलेक्ट्रॉनिक कच्चे माल और इलेक्ट्रॉनिक घटकों के क्षेत्रों में एक प्रमुख स्थान बनाए रखा है।टीडीके के व्यापक और नवाचार-चालित उत्पाद पोर्टफोलियो में सिरेमिक कैपेसिटर, एल्यूमीनियम इलेक्ट्रोलाइटिक कैपेसिटर, फिल्म कैपेसिटर, चुंबकीय उत्पाद, उच्च-आवृत्ति वाले घटक, पीज़ोइलेक्ट्रिक और सुरक्षा उपकरणों के साथ-साथ सेंसर और सेंसर सिस्टम (जैसे तापमान और दबाव, जैसे तापमान और दबाव,चुंबकीय और एमईएमएस सेंसर), आदि इसके अलावा, टीडीके बिजली की आपूर्ति और ऊर्जा उपकरण, चुंबकीय सिर और अन्य उत्पाद भी प्रदान करता है।इसके उत्पाद ब्रांडों में TDK, EPCOS, INVENSENSE, MICRONAS, TRONICS और TDK-LAMBDA शामिल हैं।
MPU-6050 का आंतरिक ब्लॉक आरेख
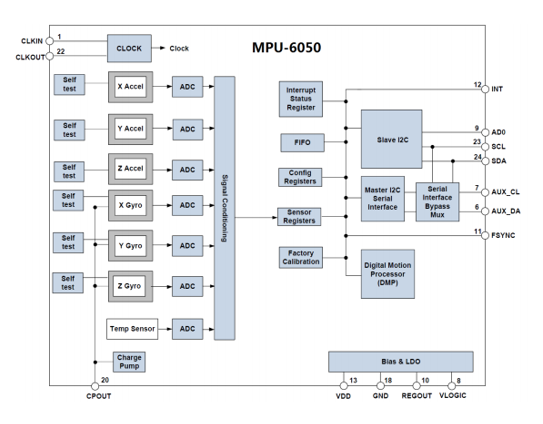
उनमें से, SCL और SDA MCU से जुड़े IIC इंटरफेस हैं, और MCU इस IIC इंटरफ़ेस के माध्यम से MPU-6050 को नियंत्रित करता है।एक IIC इंटरफ़ेस भी है, अर्थात् aux_cl और aux_da।इस इंटरफ़ेस का उपयोग बाहरी दास उपकरणों, जैसे चुंबकीय सेंसर को जोड़ने के लिए किया जा सकता है, नौ-अक्ष सेंसर बनाने के लिए।Vlogic IO पोर्ट वोल्टेज है।यह पिन न्यूनतम 1.8V का समर्थन कर सकता है।हम आमतौर पर इसे सीधे VDD से जोड़ते हैं।AD0 दास IIC इंटरफ़ेस (MCU से जुड़ा) का पता नियंत्रण पिन है।यह पिन IIC पते के सबसे कम बिट को नियंत्रित करता है।यदि यह GND से जुड़ा है, तो MPU-6050 का IIC पता 0x68 है;यदि यह VDD से जुड़ा है, तो यह 0x69 है।कृपया ध्यान दें कि यहां के पते में सबसे कम डेटा ट्रांसमिशन शामिल नहीं है (सबसे कम बिट का उपयोग रीड एंड राइट ऑपरेशंस का प्रतिनिधित्व करने के लिए किया जाता है)।MWBALANDSSTC15 पर, AD0 GND से जुड़ा हुआ है, इसलिए MPU-6050 का IIC पता 0x68 है (सबसे कम बिट को छोड़कर)।
IIC इंटरफ़ेस को प्रारंभ करें
MPU-6050 STC15 के साथ संवाद करने के लिए IIC का उपयोग करता है, इसलिए हमें MPU-6050 से जुड़े SDA और SCL डेटा लाइनों को इनिशियलाइज़ करने की आवश्यकता है।
MPU-6050 रीसेट करें
यह कदम MPU-6050 के अंदर सभी रजिस्टरों को उनके डिफ़ॉल्ट मानों में पुनर्स्थापित करता है, जो कि पावर मैनेजमेंट रजिस्टर 1 (0x6b) के 1 से 7 बिट 7 लिखकर प्राप्त किया जाता है।रीसेट करने के बाद, पावर मैनेजमेंट रजिस्टर 1 को डिफ़ॉल्ट मान (0x40) पर बहाल किया जाएगा, और इस रजिस्टर को बाद में MPU-6050 को जगाने के लिए 0x00 पर सेट किया जाना चाहिए और इसे एक सामान्य कार्य अवस्था में डाल दिया जाएगा।
कोणीय वेग सेंसर (Gyro) और त्वरण सेंसर की पूर्ण पैमाने पर सीमा निर्धारित करें
इस चरण में, हम क्रमशः गायरोस्कोप कॉन्फ़िगरेशन रजिस्टर (0x1b) और त्वरण सेंसर कॉन्फ़िगरेशन रजिस्टर (0x1c) के माध्यम से दो सेंसर की पूर्ण पैमाने पर रेंज (FSR) सेट करते हैं।आमतौर पर, हम Gyroscope की पूर्ण पैमाने पर रेंज को and 2000dps पर सेट करते हैं और एक्सेलेरोमीटर की पूर्ण पैमाने पर ± 2G पर सेट करते हैं।
अन्य पैरामीटर सेट करें
यहां, हमें निम्नलिखित मापदंडों को भी कॉन्फ़िगर करने की आवश्यकता है: रुकावटों को बंद करें, AUX I2C इंटरफ़ेस को अक्षम करें, FIFO को अक्षम करें, Gyroscope नमूनाकरण दर सेट करें, और डिजिटल कम-पास फ़िल्टर (DLPF) को कॉन्फ़िगर करें।चूंकि हम इस अध्याय में डेटा पढ़ने के लिए इंटरप्ट का उपयोग नहीं करते हैं, इसलिए इंटरप्ट फ़ंक्शन को बंद करने की आवश्यकता है।उसी समय, चूंकि हम अन्य बाहरी सेंसर को जोड़ने के लिए AUX I2C इंटरफ़ेस का उपयोग नहीं कर रहे हैं, इसलिए हमें इस इंटरफ़ेस को भी बंद करने की आवश्यकता है।इन कार्यों को इंटरप्ट इनेबल रजिस्टर (0x38) और उपयोगकर्ता नियंत्रण रजिस्टर (0x6a) के माध्यम से नियंत्रित किया जा सकता है।MPU-6050 सेंसर डेटा को स्टोर करने के लिए FIFO का उपयोग कर सकते हैं, लेकिन हमने इस अध्याय में इसका उपयोग नहीं किया है, इसलिए सभी FIFO चैनलों को बंद करने की आवश्यकता है।इसे FIFO सक्षम रजिस्टर (0x23) के माध्यम से नियंत्रित किया जा सकता है।डिफ़ॉल्ट रूप से, इस रजिस्टर का मान 0 है (यानी, FIFO अक्षम है), इसलिए हम सीधे डिफ़ॉल्ट मान का उपयोग कर सकते हैं।जाइरोस्कोप की नमूना दर नमूना दर डिवाइडर रजिस्टर (0x19) द्वारा नियंत्रित की जाती है।आम तौर पर, हम इस नमूने की दर को 50 पर सेट करते हैं। डिजिटल कम-पास फ़िल्टर (DLPF) का कॉन्फ़िगरेशन कॉन्फ़िगरेशन रजिस्टर (0x1a) के माध्यम से पूरा हो जाता है।सामान्यतया, हम डेटा सटीकता और प्रतिक्रिया गति को संतुलित करने के लिए DLPF को आधे बैंडविड्थ पर सेट करेंगे।
सिस्टम घड़ी स्रोत को कॉन्फ़िगर करें और कोणीय वेग सेंसर और त्वरण सेंसर को सक्षम करें
सिस्टम घड़ी स्रोत की सेटिंग पावर मैनेजमेंट रजिस्टर 1 (0x6b) पर निर्भर करती है, जहां इस रजिस्टर के सबसे कम तीन बिट्स घड़ी स्रोत के चयन को निर्धारित करते हैं।डिफ़ॉल्ट रूप से, इन तीन बिट्स को 0 पर सेट किया जाता है, जिसका अर्थ है कि सिस्टम घड़ी स्रोत के रूप में आंतरिक 8MHz RC ऑसिलेटर का उपयोग करता है।हालांकि, घड़ी की सटीकता में सुधार करने के लिए, हम अक्सर इसे 1 पर सेट करते हैं और घड़ी स्रोत के रूप में एक्स-एक्सिस गायरोस्कोप पीएलएल का चयन करते हैं।इसके अलावा, कोणीय वेग सेंसर और त्वरण सेंसर को सक्षम करना भी आरंभीकरण प्रक्रिया में एक महत्वपूर्ण कदम है।दोनों ऑपरेशन पावर मैनेजमेंट रजिस्टर 2 (0x6c) के माध्यम से लागू किए जाते हैं।इसी सेंसर को सक्रिय करने के लिए बस इसी बिट को 0 पर सेट करें।उपरोक्त चरणों को पूरा करने के बाद, MPU-6050 सामान्य कार्य स्थिति में प्रवेश कर सकता है।वे रजिस्टर जो विशेष रूप से सेट नहीं हैं, वे सिस्टम द्वारा डिफ़ॉल्ट मान पूर्व निर्धारित को अपनाएंगे।
MPU-6050 कैसे काम करता है?
गायरो सेंसर
सेंसर अंदर एक गायरो से सुसज्जित है, जो हमेशा जाइरोस्कोपिक प्रभाव के कारण प्रारंभिक दिशा के समानांतर रहेगा।इसलिए, हम प्रारंभिक दिशा से Gyro के विचलन का पता लगाकर रोटेशन की दिशा और कोण की गणना कर सकते हैं।
एक्सेलेरोमीटर संवेदक
एक एक्सेलेरोमीटर सेंसर एक उपकरण है जो त्वरण को माप सकता है और यह पीजोइलेक्ट्रिक प्रभाव के सिद्धांत के आधार पर काम करता है।त्वरण के दौरान, सेंसर द्रव्यमान ब्लॉक पर लागू जड़ता बल को मापता है और फिर न्यूटन के दूसरे कानून का उपयोग करके त्वरण मूल्य की गणना करता है।
डिजिटल मोशन प्रोसेसर
DMP MPU6050 चिप में एक डेटा प्रोसेसिंग मॉड्यूल है जिसमें गायरोस्कोप और एक्सेलेरोमीटर सेंसर से डेटा प्राप्त करने और आउटपुट क्वाटरनियन को संसाधित करने के लिए एक अंतर्निहित कलमन फ़िल्टरिंग एल्गोरिथ्म है।यह सुविधा परिधीय माइक्रोप्रोसेसर के कार्यभार को बहुत कम करती है और थकाऊ फ़िल्टरिंग और डेटा फ्यूजन प्रक्रिया से बचती है।
नोट:
चतुर्भुज: चतुर्भुज सरल सुपरकम्प्लेक्स संख्याएं हैं।जटिल संख्या वास्तविक संख्याओं और काल्पनिक इकाई I से बना है, जहां मैं^2 = -1।
MPU-6050 का उपयोग कहाँ किया जाता है?
• खिलौने
• हैंडसेट और पोर्टेबल गेमिंग
• गति-आधारित खेल नियंत्रक
• Blurfree ™ तकनीक (वीडियो/अभी भी छवि स्थिरीकरण के लिए)
• AirSign ™ तकनीक (सुरक्षा/प्रमाणीकरण के लिए)
• Instantgesture ™ ig ™ जेस्चर मान्यता
• स्वास्थ्य, फिटनेस और खेल के लिए पहनने योग्य सेंसर
• मोशन-सक्षम गेम और एप्लिकेशन फ्रेमवर्क
• MotionCommand ™ प्रौद्योगिकी (जेस्चर शॉर्ट-कट्स के लिए)
• स्थान-आधारित सेवाएं, ब्याज के बिंदु, और मृत रेकनिंग
• इंटरनेट से जुड़े डीटीवी और सेट-टॉप बॉक्स, 3 डी चूहों के लिए 3 डी रिमोट कंट्रोल
• Touchanewhere ™ तकनीक ("कोई टच" यूआई एप्लिकेशन कंट्रोल/नेविगेशन के लिए)
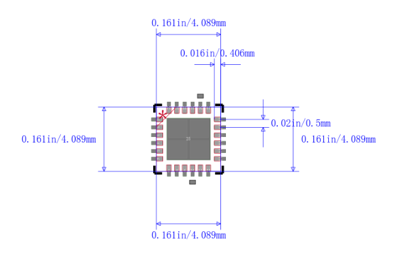
MPU-6050 का पैकेज
MPU-6050 के शोर को कैसे कम करें?
हम MPU-6050 के शोर को कम करने के लिए निम्नलिखित तरीके ले सकते हैं:
कैलिब्रेटेड सेंसर का उपयोग करें: MPU-6050 के एक्सेलेरोमीटर और जाइरोस्कोप को कैलिब्रेट करना सेंसर के पूर्वाग्रह और त्रुटि को समाप्त कर सकता है, इस प्रकार शोर के प्रभाव को कम कर सकता है।अंशांकन प्रक्रिया में आमतौर पर दो चरण होते हैं: स्थैतिक अंशांकन और गति अंशांकन।
हार्डवेयर फ़िल्टरिंग प्रक्रिया: MPU-6050 की पावर लाइन में फ़िल्टर कैपेसिटर जोड़ने से सेंसर पर बिजली की आपूर्ति के शोर के प्रभाव को कम किया जा सकता है।इस बीच, पीसीबी लेआउट के दौरान, हमें MPU-6050 को हस्तक्षेप के संभावित स्रोतों से दूर रखने की कोशिश करनी चाहिए, जैसे कि उच्च-आवृत्ति सिग्नल लाइन्स और उच्च-शक्ति वाले घटकों।
सॉफ्टवेयर फ़िल्टरिंग प्रोसेसिंग: MPU-6050 से कच्चे डेटा को एकत्र करने के बाद, हम शोर-प्रेरित हस्तक्षेप को खत्म करने के लिए प्रारंभिक डेटा को पूर्व-प्रक्रिया के लिए एक सॉफ़्टवेयर फ़िल्टरिंग लिंक जोड़ सकते हैं।आमतौर पर उपयोग किए जाने वाले सॉफ़्टवेयर फ़िल्टरिंग विधियों में मीन फ़िल्टरिंग, माध्य फ़िल्टरिंग, कलमन फ़िल्टरिंग और इतने पर शामिल हैं।
आंतरिक कम-पास फ़िल्टर का उपयोग करें: MPU-6050 में एक आंतरिक एकीकृत डिजिटल कम-पास फ़िल्टर है, जिसका उपयोग इसकी कटऑफ आवृत्ति निर्धारित करके उच्च आवृत्ति शोर को कम करने के लिए किया जा सकता है।विशेष रूप से, हम A/D नमूने के कारण होने वाले उच्च-आवृत्ति शोर को खत्म करने के लिए MPU-6050 के कॉन्फ़िगर रजिस्टर को संशोधित करके डिजिटल फ़िल्टर की कटऑफ आवृत्ति सेट कर सकते हैं।
MPU-6050- आधारित गति प्रक्षेपवक्र गणना
MPU-6050 एक छह-अक्ष एक्सेलेरोमीटर और गायरोस्कोप सेंसर है जिसका उपयोग वस्तुओं की गति और दृष्टिकोण को मापने के लिए किया जा सकता है।MPU-6050 पर आधारित गति प्रक्षेपवक्र गणना को निम्नलिखित चरणों द्वारा महसूस किया जा सकता है:
पहला कदम सेंसर डेटा पढ़ना है।हमें उपयुक्त ड्राइवरों और पुस्तकालय कार्यों का उपयोग करके MPU-6050 सेंसर से एक्सेलेरोमीटर और गायरोस्कोप डेटा पढ़ने की आवश्यकता है।ये डेटा आमतौर पर एक डिजिटल प्रारूप में आउटपुट होते हैं, इसलिए उन्हें भौतिक इकाइयों में वास्तविक माप में परिवर्तित करने के लिए कुछ रूपांतरण और अंशांकन कार्य की आवश्यकता होती है।
दूसरा कदम त्वरण की गणना करना है।सबसे पहले, हमें प्रत्येक अक्ष में ऑब्जेक्ट के त्वरण को प्राप्त करने के लिए एक्सेलेरोमीटर से डेटा को संसाधित करने की आवश्यकता है।इसके बाद, प्रत्येक अक्ष में ऑब्जेक्ट के वेग और विस्थापन की गणना करने के लिए, हमें त्वरण डेटा को एकीकृत करने की आवश्यकता है।संख्यात्मक एकीकरण तकनीक, जैसे कि यूलर की विधि या लंगर-कुट्टा विधि, का उपयोग अक्सर इस प्रक्रिया में विस्थापन गणना की सटीकता सुनिश्चित करने के लिए किया जाता है।
तीसरा कदम कोणीय वेग की गणना करना है।जाइरोस्कोप डेटा का उपयोग करते हुए, प्रत्येक अक्ष में ऑब्जेक्ट के कोणीय वेग की गणना की जा सकती है।फिर से, इस डेटा को वास्तविक भौतिक इकाइयों में कोणीय वेग प्राप्त करने के लिए कैलिब्रेट और परिवर्तित करने की आवश्यकता है।
चौथा कदम रोटेशन की गणना करना है।कोणीय वेग डेटा को एकीकृत करके, प्रत्येक अक्ष में ऑब्जेक्ट के रोटेशन के कोण की गणना की जा सकती है।यह कोण की गणना करने के लिए यूलर की विधि या लॉन्ग-कुट्टा विधि जैसी संख्यात्मक एकीकरण तकनीकों का उपयोग करके किया जा सकता है।
पांचवां कदम डेटा को मर्ज करना है।हम ऑब्जेक्ट के पूर्ण दृष्टिकोण और स्थिति की जानकारी प्राप्त करने के लिए एक्सेलेरोमीटर और गायरोस्कोप से डेटा को जोड़ते हैं।यह एल्गोरिदम जैसे कि क्वाटरनियन-आधारित रवैया सॉल्वर या यूलर एंगल सॉल्वर का उपयोग करके किया जा सकता है।
छठा कदम परिणामों की कल्पना करना है।हम गणना की गई वस्तु गति प्रक्षेपवक्र को एक 3 डी समन्वय प्रणाली में बिंदुओं के एक सेट में परिवर्तित करते हैं और इसे ऑब्जेक्ट के गति प्रक्षेपवक्र और दृष्टिकोण परिवर्तनों की अधिक सहज समझ के लिए उपयुक्त विज़ुअलाइज़ेशन टूल का उपयोग करके प्रदर्शित करते हैं।
अक्सर पूछे जाने वाले प्रश्न [FAQ]
1. MPU6050 कितना सही है?
अधिग्रहीत परिणामों ने 1 % से कम और विश्वसनीयता की पर्याप्त सटीकता दिखाई, जिससे लिफ्ट शाफ्ट के उचित आयाम और लिफ्ट उद्योग के उच्च मानकों का आश्वासन दिया गया।
2. MPU6050 से डेटा कैसे पढ़ें?
आंतरिक MPU6050 रजिस्टरों को पढ़ने के लिए, मास्टर एक प्रारंभ स्थिति भेजता है, इसके बाद I2C दास पता और एक लिखें बिट, और फिर रजिस्टर पता जो पढ़ने जा रहा है।
3. MPU6050 का उपयोग कहाँ किया जाता है?
पहनने योग्य स्वास्थ्य-ट्रैकिंग, फिटनेस-ट्रैकिंग उपकरणों में।ड्रोन और क्वाडकॉप्टरों में, MPU6050 का उपयोग स्थिति नियंत्रण के लिए किया जाता है।रोबोटिक आर्म को नियंत्रित करने में उपयोग किया जाता है।हैंड इशारा नियंत्रण उपकरण।
4. क्या MPU6050 एक IMU है?
MPU6050 IMU सेंसर ब्लॉक MPU-6050 सेंसर से डेटा पढ़ता है जो हार्डवेयर से जुड़ा हुआ है।ब्लॉक सेंसर के अक्षों के साथ त्वरण, कोणीय दर और तापमान आउटपुट करता है।
5. MPU6050 का प्रसंस्करण क्या है?
यह MPU6050 का ऑनबोर्ड प्रोसेसर है जो एक्सेलेरोमीटर और गायरोस्कोप से आने वाले डेटा को जोड़ता है।DMP MPU6050 का उपयोग करने की कुंजी है और बाद में विस्तार से समझाया गया है।सभी माइक्रोप्रोसेसरों के साथ DMP को चलाने के लिए फर्मवेयर की आवश्यकता होती है।
हमारे बारे में
ALLELCO LIMITED
और पढो
त्वरित पूछताछ
कृपया एक जांच भेजें, हम तुरंत जवाब देंगे।

LM317 के लिए गहराई से गाइड: समायोज्य वोल्टेज नियामकों को समझना
2024/09/3 पर
TL431 को समझना: सटीक शंट नियामकों के लिए एक व्यापक गाइड
2024/09/3 पर
लोकप्रिय लेख
-
सर्किट में GND क्या है?
1970/01/1 पर 3108
-

RJ-45 कनेक्टर गाइड: RJ-45 कनेक्टर रंग कोड, वायरिंग योजनाएं, R-J45 एप्लिकेशन, RJ-45 डेटशीट
1970/01/1 पर 2672
-
इलेक्ट्रॉनिक्स VCC, VDD, VEE, VSS और GND में बिजली की आपूर्ति वोल्टेज को समझना
0400/11/15 पर 2211
-

फाइबर कनेक्टर प्रकार: एससी बनाम एलसी और एलसी वीएस एमटीपी
1970/01/1 पर 2182
-

DB9 और RS232 के बीच तुलना
1970/01/1 पर 1802
-

LR44 बैटरी क्या है?
बिजली, कि सर्वव्यापी बल, चुपचाप हमारे दैनिक जीवन के हर पहलू को, तुच्छ गैजेट्स से लेकर जीवन-धमकी वाले चिकित्सा उपकरणों तक, यह एक मूक भूमिका निभाता है।हालांकि, वास्तव में इस ऊर्जा को लोभी करना, विशेष रूप से इसे कैसे स्टोर करन...1970/01/1 पर 1774
-
बुनियादी बातों को समझना: इंडक्शन प्रतिरोध, औरकैपिटेंस
इलेक्ट्रिकल इंजीनियरिंग के जटिल नृत्य में, मौलिक तत्वों की एक तिकड़ी केंद्र चरण लेती है: इंडक्शन, प्रतिरोध और कैपेसिटेंस।प्रत्येक अद्वितीय लक्षण हैं जो इलेक्ट्रॉनिक सर्किट के गतिशील लय को निर्धारित करते हैं।यहां, हम इन ...1970/01/1 पर 1728
-

CR2430 बैटरी व्यापक गाइड: विनिर्देशों, अनुप्रयोगों और CR2032 बैटरी की तुलना
CR2430 बैटरी क्या है?CR2430 बैटरी का लाभआदर्शCR2430 बैटरी अनुप्रयोगCR2430 समतुल्यCR2430 बनाम CR2032बैटरी CR2430 आकारCR2430 और समकक्षों को खरीदते समय क्या देखेंआंकड़ा पत्रक पीडीएफअक्सर पूछे जाने वाले प्रश्नों बैटरी छोटे इलेक्ट्रॉनिक उपकरणों ...1970/01/1 पर 1676
-
आरएफ क्या है और हम इसका उपयोग क्यों करते हैं?
रेडियो फ्रीक्वेंसी (RF) तकनीक आधुनिक वायरलेस संचार का एक महत्वपूर्ण हिस्सा है, जो भौतिक कनेक्शन के बिना लंबी दूरी पर डेटा ट्रांसमिशन को सक्षम करता है।यह लेख RF की मूल बातें में बताता है, यह बताते हुए कि इलेक्ट्रोमैग्नेटिक व...1970/01/1 पर 1670
-
ट्रांजिस्टर में एचएफई के लिए व्यापक गाइड
ट्रांजिस्टर आधुनिक इलेक्ट्रॉनिक उपकरणों में महत्वपूर्ण घटक हैं, जो सिग्नल प्रवर्धन और नियंत्रण को सक्षम करते हैं।यह लेख एचएफई के आसपास के ज्ञान में देरी करता है, जिसमें ट्रांजिस्टर के एचएफई मूल्य का चयन कैसे किया जाए, एच...5600/11/15 पर 1632
हॉट पार्ट नंबर
-

IDC5020ER471M
Vishay Dale
FIXED IND 470UH 500MA 1.27OHM SM
NMV0505DC
Murata Power Solutions Inc.
DC DC CONVERTER +/-5V 1W
LM3S1751-IQC50-A2
Texas Instruments
IC MCU 32BIT 128KB FLASH 100LQFP
AZ1084D-1.8TRG1
Diodes Incorporated
IC REG LINEAR 1.8V 5A TO252-2
VTP210GF
Littelfuse Inc.
PTC RESET FUSE 16V 2.1A STRAP
RT1206DRE071K2L
YAGEO
RES SMD 1.2K OHM 0.5% 1/4W 1206
C0603C0G1E1R1C030BF
TDK Corporation
CAP CER 1.1PF 25V C0G 0201
SQD70140EL_GE3
Vishay Siliconix
MOSFET N-CH 100V 30A TO252AA
SUP60N10-16L-E3
Vishay Siliconix
MOSFET N-CH 100V 60A TO220AB
MCP4661T-104E/ST
Microchip Technology
IC DGT POT 100KOHM 257TP 14TSSOP
SPM3015T-1R0M-LR
TDK Corporation
FIXED IND 1UH 3.8A 45.1 MOHM SMD
UCC28951QPWRQ1
Texas Instruments
IC REG CTRLR FULL-BRIDGE 24TSSOP
TMS320C203PZ
Texas Instruments
IC DSP 100LQFP
P0420T
Pulse Electronics
CMC 3.3A 2LN SMD
SI5476DU-T1-GE3
Vishay Siliconix
MOSFET N-CH 60V 12A CHIPFET
SMBJ45CA
MDD
TVS DIODE 45VWM 72.7VC SMB
CSPEMI307AG
onsemi
FILTER RC(PI) 100 OHM/30PF SMD
TMOV20RP300E
Hamlin / Littelfuse
VARISTOR 470V 10KA DISC 20MM -

ICL7612ACPA
Analog Devices Inc./Maxim Integrated
IC OPAMP GP 1 CIRCUIT 8DIP
SMCJ6V5A
Taiwan Semiconductor Corporation
TVS DIODE 6.5VWM 11.2VC SMC
CC0603DRNPO9BN5R0
YAGEO
CAP CER 5PF 50V C0G/NPO 0603
DM74AS1004AMX
onsemi
IC INVERTER 6CH 1-INP 14SOIC
LM2576HVS-ADJ
Texas Instruments
IC REG BUCK ADJ 3A TO263-5
TPSE477M010R0200
KYOCERA AVX
CAP TANT 470UF 20% 10V 2917
ADG728BRUZ-REEL
Analog Devices Inc.
IC MUX 8:1 4.5OHM 16TSSOP
VI-26D-MW
Vicor Corporation
DC DC CONVERTER 85V 100W
VI-J60-EW
Vicor Corporation
DC DC CONVERTER 5V 100W
RCD-24-0.70/PL/A
Recom Power
LED SUPPLY CC BUCK 2-35V 700MA
2KBP10M-E4/51
Vishay General Semiconductor - Diodes Division
BRIDGE RECT 1PHASE 1KV 2A KBPM
1000B-5001X
iNRCORE, LLC
PULSE XFMR 1:1 350UH
LW010A
ABB Power Electronics Inc.
DC DC CONVERTER 5V 10W
IS45S16400F-6TLA1
ISSI, Integrated Silicon Solution Inc
IC DRAM 64MBIT PAR 54TSOP II
M2GL050T-1FGG484M
Microchip Technology
IC FPGA 267 I/O 484FBGA
DAC10GSZ-REEL
Analog Devices Inc.
IC DAC 10BIT A-OUT 18SOIC
LM61495QRPHRQ1
Texas Instruments
10-A AUTOMOTIVE BUCK CONVERTER O
GRM1885C1H2R0BA01J
Murata Electronics
CAP CER 2PF 50V C0G/NP0 0603 -

MPC8343CVRAGDB
Freescale Semiconductor
POWERQUICC II PRO PROCESSOR
CL10C1R2CB8NNNC
Samsung Electro-Mechanics
CAP CER 1.2PF 50V C0G/NP0 0603
SRR6038-820Y
Bourns Inc.
FIXED IND 82UH 700MA 324MOHM SMD
AD9889BBBCZ-80
Analog Devices Inc.
IC TRANSMITTER HDMI/DVI 76CSPBGA
06033C153JAT4A
KYOCERA AVX
CAP CER 0.015UF 25V X7R 0603
PI6CV304WEX
Diodes Incorporated
IC CLK BUFFER 1:4 160MHZ 8SOIC
MSP430F5418AIPN
Texas Instruments
IC MCU 16BIT 128KB FLASH 80LQFP
ADS7956SRHBR
Texas Instruments
IC ADC 10BIT SAR 32VQFN
TPS659102A1RSL
Texas Instruments
IC PWR MGMT 8 LDO 48VQFN
CM4732V201R-10
Laird-Signal Integrity Products
CMC 8A 6LN 200 OHM SMD
SMBJ14A
Yangzhou Yangjie Electronic Technology Co.,Ltd
TVS DIODE 14VWM 23.2VC DO214AA
HM1LK0
Amphenol ICC (FCI)
METRAL HDR
LT1713IMS8
Analog Devices Inc.
IC COMPARATOR 1 W/LATCH 8MSOP
LTC7541ABN#PBF
Analog Devices Inc.
IC DAC 12BIT A-OUT 18DIP
MC100ELT20D
onsemi
IC TRNSLATR TTL-PECL DIFF 8-SOIC
ADS7815U/1K
Texas Instruments
IC ADC 16BIT SAR 28SOIC
12101U1R0BAT2A
KYOCERA AVX
CAP CER 1PF 100V NP0 1210
FMMT734TA
Diodes Incorporated
TRANS PNP DARL 100V 0.8A SOT23-3